EV series BLDC Motor
The EV series DC input brushless DC motor and drive package offers variety of control functions, four-quadrant operation, and high efficiency performance. Motor power covers up to 350W(24VDC) / 750W(48VDC). With the incremental encoder model, in addition to highly accurate speed control, EV series offers position control and torque limit function.
Features
| ■ | Electromagnetic brake type (MBrake) is suitable for position-holding during standstill |
| ■ | Programmable I/O function and Operation parameters |
| ■ | Four Quadrant Operation, well-suited for AGV's smooth speed control (battery power required). |
| ■ | Variety of control methods (e.g., duty mode, speed mode, position mode) for AGV continuous operation and stop positioning. |
| ■ | Special Modbus-based communication protocol designed for simultaneous multi-drive control for AGV |
| ■ | Combined with spacing-saving hollow shaft flat gearhead which is suitable for AGV application. |
- Specifications
- Product Number Code
- Product Line
| Supply Voltage | 2 models 24VDC 48VDC |
| Mode of Operation | Speed control – motor speed control Position control – Position control with Multi-drive protocol. Duty Cycle – control output PWM % directly Torque limit – Limit torque output in other operation mode. |
| Command | Network - RS485 or RS232 Modbus RTU/ASCII Digital indexing – Select among 8 preset operation data during operation by input function (M0, M1, M2). External analog input - 0 ~ 5 or 0 ~ 10VDC voltage. External potentiometer Internal potentiometer - Panel VR for speed, acceleration, deceleration setting Pulse input - PWM / PFM (frequency) 50 ~ 2kHz |
| IO | Digital input - 4 programmable inputs (Internal 5V or external 24V.). Pulse input - 1 programmable pulse input (Internal 5V or external 24V.). Digital output - 2 programmable general outputs. 1 programmable speed-out output. Analog input - 2 programmable analog inputs Electromagnetic brake output - Control electromagnetic brake directly. Internal potentiometer(INT-VR) - 1 programmable internal potentiometers. |
| Network Communication | RS485 - Control motor and set parameter by Modbus RTU. (Special multi-drive protocol for AGV position control) RS232 - Control motor or set parameter by Modbus ASCII. |
| Parameter Setting | RS485 / 232 - Set parameter by PC with easy interface software (A_HMI). Panel switch - Set communication and digital input power by panel switch. |
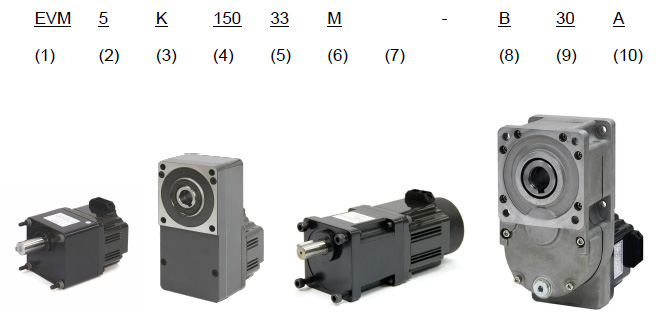
Motor with Gearhead (Combination Type*) Product Number Code
| No. | Name | Description |
| 1. | Motor Series | EVM : EV Series Motor |
| 2. | Motor Frame Size | 5 : 90mm 6 : 104mm |
| 3. | Rated Supply Voltage |
K : 24VDC N : 48VDC |
| 4. | Output Power | 150 : 150W 200 : 200W 350 : 350W 500 : 500W 750 : 750W |
| 5. | Rated Speed | 30 : 3000r/min 33 : 3300r/min |
| 6. | Optional Function | Blank: Standard M: Electromagnetic Brake Type (MBrake) E: Incremental Encoder Supported Type H: Electromagnetic Brake (MBrake) + Incremental Encoder Supported Type |
| 7. | Motor Shaft Type | Blank: Blank: Combination type (connected to gearhead already). GB : For GB series parallel shaft gearhead GBF : For GB series hollow shaft gearhead A : shaft with key and keyway D : D shaft |
| 8. | Gearhead Series | B : GB series Gearhead |
| 9. | Gear Ratio | 05 : 5 10 : 10 15 : 15 20 : 20 30 : 30 50 : 50 |
| 10. | Gearhead Shaft Type | A : Parallel shaft gearhead (with key and keyway) F : Hollow shaft flat gearhead |
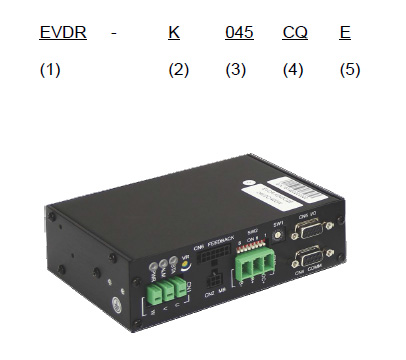
Drive Product Number Code
| No. | Name | Description |
| 1. | Driver Series | EVDR :EV Series |
| 2. | Supply Voltage | K : 24VDC N :48 VDC |
| 3. | Maximum Output Current |
045 : 45 A |
| 4. | Reserved | -- |
| 5. | Feedback Model | Blank : Standard (halls) E : Incremental Encoder Supported Model |
Motor
| Product | Model No. | Frame Size | Voltage | Output Power (W) | Rated Torque | Speed Range | ⬛Optional Function | ⬜ Shaft Type |
 |
EVM5K15033⬛⬜ | 90 | 24VDC | 150 | 0.48N-m | Hall: 85 ~ 3500 r/min Encoder: 10 ~ 3500 r/min | Blank: Standard E: Incremental Encoder M: Electromagnetic Brake Type H: Encoder + Electromagnetic Brake |
D: D Shaft A: Key Shaft GB: For GB series parallel shaft gearhead GBF: For GB series hollow shaft gearhead GBSF: For GBS series hollow shaft gearhead GU: For GU series Parallel shaft gearhead |
| EVM5K20030⬛⬜ | 90 | 24VDC | 200 | 0.64N-m | ||||
| EVM5K35030⬛⬜ | 90 | 24VDC | 350 | 1.1N-m | ||||
| EVM5K35018⬛⬜ | 90 | 24VDC | 350 | 1.85N-m | Hall: 85 ~ 2000 r/min Encoder: 10 ~ 2000 r/min | |||
| EVM5N35030⬛⬜ | 90 | 48VDC | 350 | 1.1N-m | Hall: 85 ~ 3500 r/min Encoder: 10 ~ 3500 r/min | |||
| EVM5N50030⬛⬜ | 90 | 48VDC | 500 | 1.6N-m | ||||
 |
EVM6N75030⬛⬜ | 104 | 48VDC | 750 | 2.35N-m |
Motor + Gearhead
| Product | Model No. | Frame Size | Voltage | Output Power (W)* | Rated Torque | Speed Range (motor) | ⬛ Optional Function | ⬜ Gear Ratio & Rated Torque | Gearhead Type |
 |
EVM5K15033⬛-U⬜A | 90 | 24VDC | 150 | 0.48N-m | Hall: 85 ~ 3500 r/min Encoder: 10 ~ 3500 r/min | Blank: Standard E: Incremental Encoder M: Electromagnetic Brake Type H: Encoder + Electromagnetic Brake |
15: 10N-m 20: 13N-m 25: 15N-m 30: 18N-m 40 / 50: 20N-m |
GU5 Parallel Shaft Gearhead |
 |
EVM5K20030⬛-B⬜A | 90 | 24VDC | 200 | 0.64N-m | 5 / 10 / 15: 15N-m 20 / 30 / 50: 20N-m |
GU5 Parallel Shaft Gearhead | ||
| EVM5K35030⬛-B⬜A | 90 | 24VDC | 350 | 1.1N-m | |||||
| EVM5N35030⬛-B⬜A | 90 | 48VDC | 350 | 1.1N-m | |||||
 |
EVM5K15033⬛-BS⬜F | 90 | 24VDC | 150 | 0.48N-m | 20: 6.8N-m 33: 10.2N-m 50: 17N-m |
GB5 Hollow Shaft Gearhead | ||
 |
EVM5K20030⬛-B⬜F | 90 | 24VDC | 200 | 0.64N-m | 20: 22.1N-m 30: 33.2N-m 50: 5.3N-m |
GB5 Hollow Shaft Gearhead | ||
| EVM5K35030⬛-B⬜F | 90 | 24VDC | 350 | 1.1N-m | |||||
| EVM5N35030⬛-B⬜F | 90 | 48VDC | 350 | 1.1N-m |
Drive
| Product | Model No. | Voltage | Maximum Current | Output Power (W)* | Function | Motor Supported |
 |
EVDR-K045CQ | 24VDC | 45 A | 150 ~ 350W | Standard (Hall) | EVM5K15033⬛⬜ EVM5K20030⬛⬜ EVM5K35030⬛⬜ EVM5K35018⬛⬜ |
| EVDR-K045CQE | 24VDC | Encoder | ||||
| EVDR-N045CQ | 48VDC | 350 ~ 750w | Standard (Hall) | EVM5N35030⬛⬜ EVM5N50030⬛⬜ |
||
| EVDR-N045CQE | 48VDC | Encoder |
